CUBEPILOT – Bundle: The Cube Orange+ Standard Set (HX4-06222) & Here 4 (HX4-06248)
اتوپایلوت کیوب پایلوت مدل +Pixhawk Cube Orange
اتوپایلوت پیکس هاوک +Cube Orange جدیدترین و قدرتمندترین مدل فلایت کنترل در اکوسیستم Cubepilot است. اتو پایلوت پیکس هاوک cube برای کاربران علاقمند، تولید کنندگان سیستم های تجاری و سازندگان UAS طراحی شده است.فلایت کنترل پیکس هاوک بخشی از اکوسیستم وسیعی از ماژولهای خلبان خودکار و بردهای حامل است. همه مدلهای Cube با همه بردهای حامل سازگار هستند و به کاربران اجازه میدهد بردی را انتخاب کنند که به بهترین وجه با نیازهای آنها مطابقت دارد. طراحان سیستم میتوانند فلایت کنترل +Pixhawk Cube را مستقیماً از طریق مشخصات برد حامل منتشر شده در طرحهای خود ادغام کنند. فلایت کنترل Cube Orange به عنوان یک ماژول مستقل یا به عنوان یک بسته با نسخه به روز شده جدید برد حامل اصلی که اکنون شامل یک ماژول ADS-B In یکپارچه از uAvionics است در دسترس است.
عملکرد و پایداری ضد جمینگ تا حد زیادی بهبود یافته است. برد حامل با یک گیرنده ADS-B یکپارچه ۱۰۹۰ مگاهرتز، به نرم افزار اجازه می دهد تا اطلاعاتی در مورد موقعیت هواپیماهای سرنشین دار در منطقه دریافت کند که به طور موثر ایمنی پرواز پهپاد را بهبود میبخشد. دارای سیستم گرمایش داخلی IMU، اجازه پرواز در دمای سخت (-۱۰ درجه سانتیگراد تا +۵۵ درجه سانتیگراد) را میدهد. کانکتورهای DF17 مقاومت سیستم در برابر سقوط و ضربه را افزایش میدهند. همچنین پردازنده قدرتمند H7 با دقت اعشاری دابل، ۱ مگابایت رم و فرکانس تا ۴۰۰ مگاهرتز تضمین کننده پردازشی با سرعت بالا است. مجهز بودن به دو پردازنده با بالا بردن راندمان پردازشی، محاسبات عددی سریع و امنیت بالاتر را فراهم میکند.
طرح کلی بردهای حامل جدید ADS-B با نسخه های استاندارد یکسان است و تغییرات اصلی در مقایسه با حامل اصلی به شرح زیر است:
ادغام uAvonix ADS-B IN در گیرنده سریال ۵(Serial 5)
آنتن داخلی ADS-B
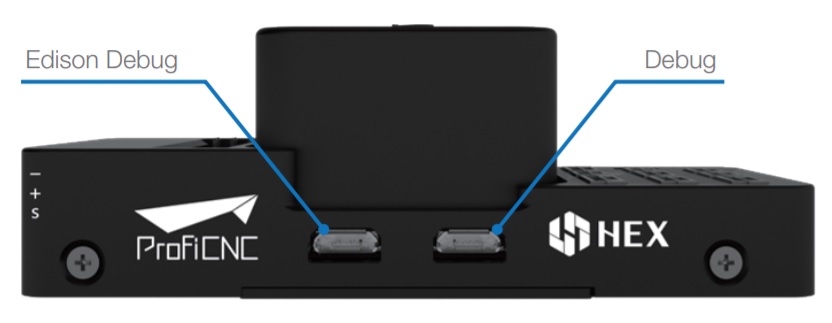
حذف Intel Edison Bay و Debug USB Ports
تمام مشخصات دیگر اتوپایلوت Pixhawk و اتصالات خارجی مانند برد اصلی همانطور که در برد Cube Black لیست شده، باقی مانده است.
ویژگی های اصلی
- پردازنده
- 32bit ARM® STM32H743 Cortex®-M7(with DP-FPU)
- ۴۰۰ Mhz/1 MB RAM/2 MB Flash
- ۳۲ bit STM32F103 failsafe co-processor
- سنسورها
- دارای ۳ عدد IMU اضافی (شتاب سنج، ژیروسکوپ و قطب نما)
- دارای شتاب سنج/ژیروسکوپ یکپارچه ICM 20649 و ارتفاع سنج MS5611 روی برد
- دارای IMU مدل InvenSense ICM20602 و مجهز به IMU/MAG مدل ICM20948 همچنین دارای ارتفاع سنج MS5611 کنترل شده دما و برد ایزوله نسبت به لرزش
- اتصال تمام سنسورها بوسیله SPI
- پاور
- منبع تغذیه اضافی با خرابی خودکار(Automatic failover)
- ریل سروو با توان بالا (۷ ولت) و جریان بالا آماده
- تمام خروجیهای محیطی در برابر جریان بیش از حد محافظت شدهاند، تمام ورودیها به صورت ESD محافظت شده است
- رابط ها
- ۱۴ عدد خروجی سرو(۸ عدد IO و ۶ عدد FMU)
- خروجی سروو S.Bus
- ورودی های R/C برای CPPM، Spectrum / DSM و S.Bus
- ورودی آنالوگ / PWM RSSI
- ۵ پورت سریال همه منظوره، ۲ عدد با کنترل جریان کامل
- ۲ عدد پورت I2C
- پورت SPI (بدون بافر، فقط برای کابل های کوتاه برای استفاده توصیه نمی شود)
- ۲ عدد رابط CAN Bus
- ۳ عدد ورودی آنالوگ( ۳.۳ ولت و ۶.۶ ولت)
- درایور زنگ پیزو پرقدرت (روی برد توسعه)
- LED پرقدرت RGB (درایور I2C سازگار فقط به صورت خارجی متصل است)
- سوئیچ ایمنی / LED
- برد حامل اختیاری برای اینتل ادیسون (منسوخ شده)
-
flight controller is a flexible autopilot intended primarily for manufacturers of commercial systems.

The controller is designed to be used with a domain-specific carrier board in order to reduce the wiring, improve reliability, and ease of assembly. For example, a carrier board for a commercial inspection vehicle might include connections for a companion computer, while a carrier board for a racer could includes ESCs for the frame of the vehicle.
Cube includes vibration isolation on two of the IMU’s, with a third fixed IMU as a reference / backup.
TIP
The manufacturer Cube Docs (opens new window)contain detailed information, including an overview of the Differences between Cube Colours (opens new window).
Key Features
- 32bit STM32H743ZI (32bit ARM Cortex M7 (opens new window), ۴۰۰ MHz, Flash 2MB, RAM 1MB).
- ۳۲ bit STM32F103 failsafe co-processor
- ۱۴ PWM / Servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible)
- Abundant connectivity options for additional peripherals (UART, I2C, CAN)
- Integrated backup system for in-flight recovery and manual override with dedicated processor and stand-alone power supply (fixed-wing use)
- Backup system integrates mixing, providing consistent autopilot and manual override mixing modes (fixed wing use)
- Redundant power supply inputs and automatic failover
- External safety switch
- Multicolor LED main visual indicator
- High-power, multi-tone piezo audio indicator
- microSD card for high-rate logging over extended periods of time
Where to Buy
- The Cube (opens new window)(ProfiCNC)
Assembly
Specifications
- Processor:
- STM32H743ZI (32bit ARM Cortex M7 (opens new window))
- ۴۰۰ MHz
- ۱ MB RAM
- ۲ MB Flash (fully accessible)
- Failsafe co-processor:
- STM32F103 (32bit ARM Cortex-M3)
- ۲۴ MHz
- ۸ KB SRAM
- Sensors: (all connected via SPI)
- Accelerometer: (۳) ICM20948, ICM20649, ICM20602
- Gyroscope: (۳) ICM20948, ICM20649, ICM20602
- Compass: (۱) ICM20948
- Barometric Pressure Sensor: (۲) MS5611
- Operating Conditions:
- Operating Temp: -10C to 55C
- IP rating/Waterproofing: Not waterproof
- Servo rail input voltage: ۳.3V / 5V
- USB port input:
- Voltage: 4V – 5.7V
- Rated current: 250 mA
- POWER:
- Input voltage: 4.1V – 5.7V
- Rated input current: 2.5A
- Rated input/output power: 14W
- Dimensions:
- Cube: ۳۸.25mm x 38.25mm x 22.3mm
- Carrier: ۹۴.5mm x 44.3mm x 17.3mm
- Interfaces
- IO Ports: 14 PWM servo outputs (8 from IO, 6 from FMU)
- 5x UART (serial ports), one high-power capable, 2x with HW flow control
- 2x CAN (one with internal 3.3V transceiver, one on expansion connector)
- R/C inputs:
- Spektrum DSM / DSM2 / DSM-X® Satellite compatible input
- Futaba S.BUS® compatible input and output
- PPM-SUM signal input
- RSSI (PWM or voltage) input
- I2C
- SPI
- ۳.3v ADC input
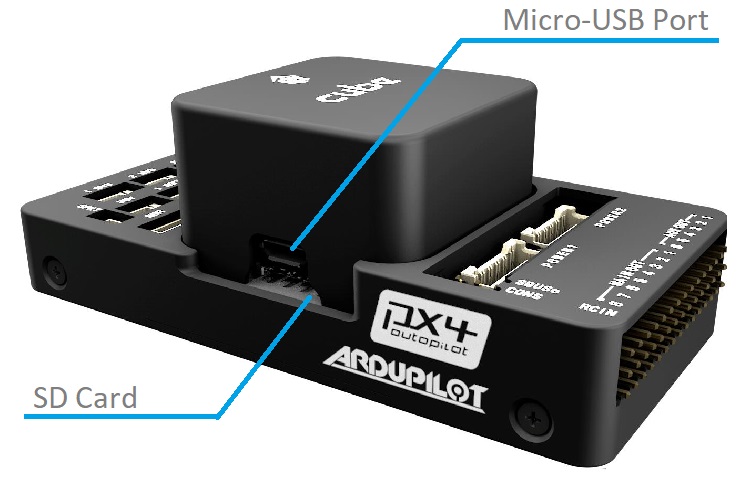
- Internal microUSB port and external microUSB port extension
Pinouts and Schematics
Board schematics and other documentation can be found here:
Top-Side (GPS, TELEM etc)
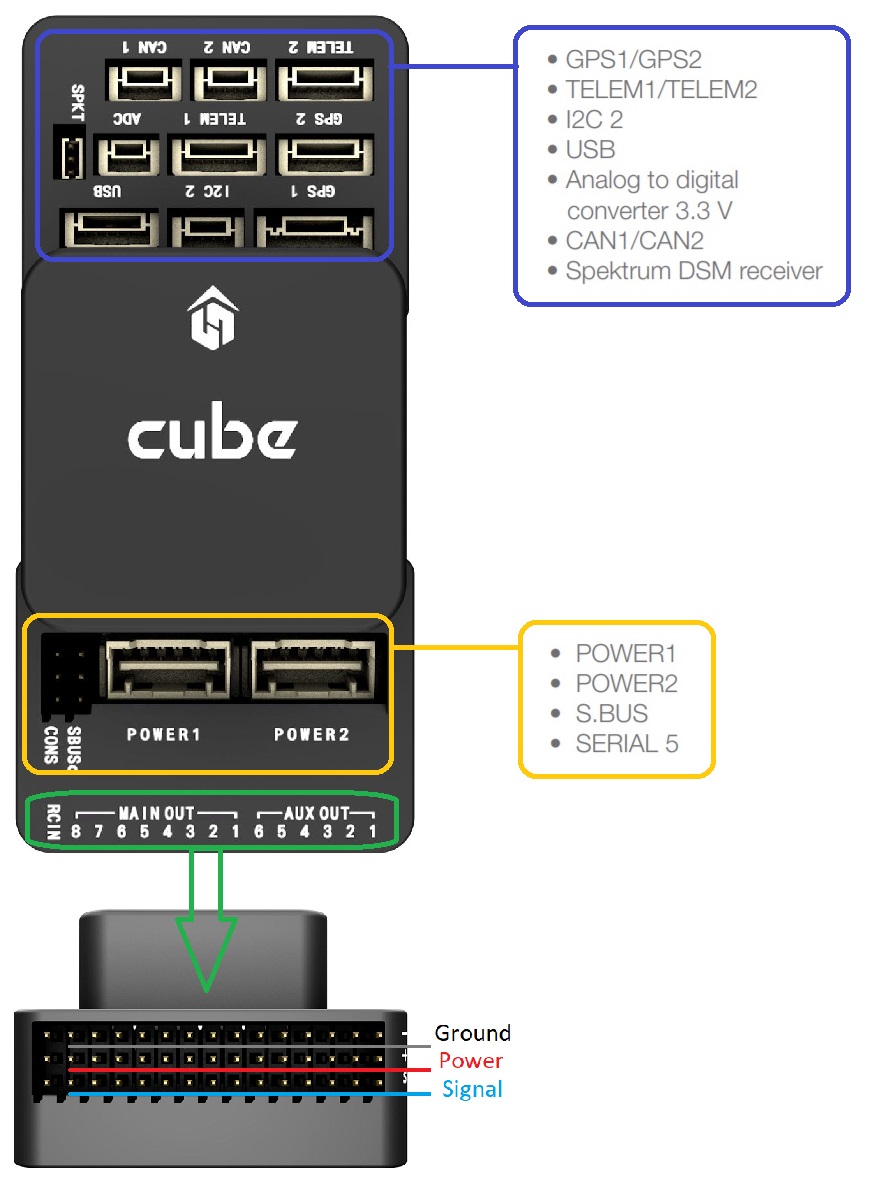
Serial Port Mapping
UART Device Port USART1 /dev/ttyS0 USART2 /dev/ttyS1 TELEM1 (flow control) USART3 /dev/ttyS2 TELEM2 (flow control) UART4 /dev/ttyS3 GPS1 USART6 /dev/ttyS4 PX4IO UART7 /dev/ttyS5 CONSOLE UART8 /dev/ttyS6 GPS2 - Debug Ports
USB/SDCard Ports