


Px4 ardupilot
The flight controller adopts a modular design and can be matched with different base plates. You can design a dedicated carrier board for your UAV to improve the integration of commercial systems, reduce wiring, improve system reliability, and enhance your UAV competitiveness (for example, integrating airspeed sensors, telemetry or even a companion computer, in the carrier board). CUAV has also provided a variety of carrier boards for you to choose from.
- Internal shock absorption
- Modular design, can be DIY carrier board
- Support USB_HS, download logs faster (PX4 not yet supported)
- Support more dshot output
- Support IMU heating, make the sensor work better
- Dedicated uavcan battery port
- ۳ sets of IMU sensors
- Car-grade RM3100 compass
- High performance processor
Quick Summary
- Main FMU Processor: STM32H743
- On-board sensors:
- Accelerometer/Gyroscope: ICM-20689
- Accelerometer/Gyroscope: ICM-20649
- Accelerometer/Gyroscope: BMI088
- Magnetometer: RM3100
- Barometer: MS5611*2
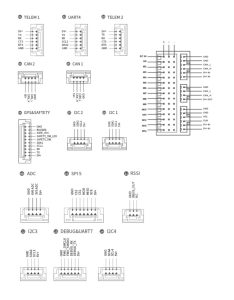
- Interfaces:
- ۱۴ PWM outputs (۱۲ supports Dshot)
- Support multiple RC inputs (SBUs / CPPM / DSM)
- Analogue / PWM RSSI input
- ۲ GPS ports(GPS and UART4 ports)
- ۴ i2c buses(Two i2c dedicated ports)
- ۲ CAN bus ports
- ۲ Power ports(Power A is common adc interface, Power C is uavcan battery interface)
- ۲ ADC intput
- ۱ USB ports
- Power System:
- Power: 4.3~5.4V
- USB Input: 4.75~5.25V
- Servo Rail Input: 0~36V
- Weight and Dimensions:
- Weight: 101 g
- Other Characteristics:
- Operating temperature: -20 ~ 80°c(Measured value)
- Three imus
- Supports temperature compensation
- Internal shock
- absorption


